On August 7th, the HUST-NU High-Level Academic Forum (Virtual) was held. It was an event jointly organized by the School of Artificial Intelligence and Automation of HUST, and the Graduate School of Engineering of Nagoya University, with AIA professor HUANG Jian and NU professor Yusehisa Hasegawa serving as chair. The forum focused on smart robot technologies, inviting ten academics from leading institutions in the field including NU, HUST, RIKEN, Tokyo Metropolitan University, Kyushu University and City University of Hong Kong to give lectures. AIA Dean ZENG Zhigang and Vice Dean ZHANG Haitao delivered opening and closing remarks respectively.
ZENG Zhigang said that the relationship between AIA and NU was dearly valued and envisioned this forum as a bridge for academic collaborations. He hoped the two institutions would deepen their cooperation in the development of Control Science and Automation discipline.
Yusehisa Hasegawa pointed out that smart robot technologies could contribute to a resilient society against this pandemic and future disasters, so it was significant to strengthen research collaborations in this field at this time. In closing, he hoped the participants enjoy the forum.
The forum was composed of ten lectures and Q&A sessions. The speakers shared their latest research findings and insights, while the audience gave feedback and had their doubts cleared.

Naoyuki Kubota, Tokyo Metropolitan University, NU alumnus
Professor Naoyuki Kubota from Tokyo Metropolitan University delivered a lecture titled Topological Mapping for Human Robot Interaction. Prof. Kubota first defined the meaning of topology for human-robot interaction(HRI) and clarified the importance of perception. Then, he elaborated on three HRI topological methods including Growing Neural Gas (GNS), Batch Learning Growing Neural Gas (BL-GNG), and Multi-layer Batch Learning-GNG. After, he mapped each method with its specific applications.
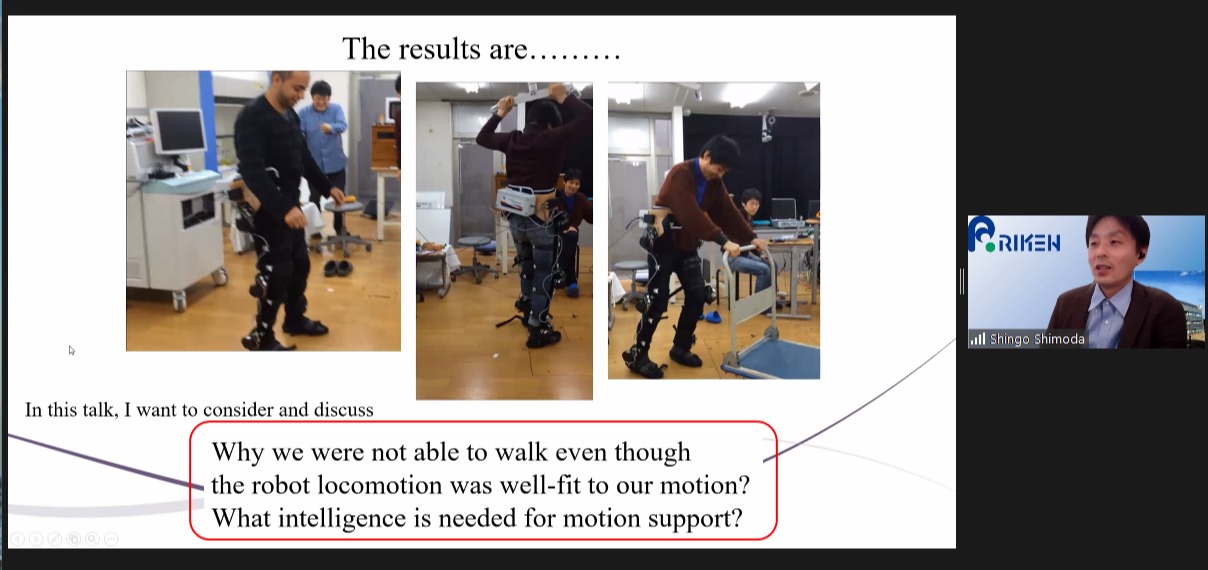
Shingo Shimoda, RIKEN, NU alumnus
Dr. Shingo Shimoda from RIKEN delivered a lecture titled Robot Intelligence for Rehabilitation and Medical Care. The lecture began with the basic motion control of robots and pointed out that robots were unable to assist the human body properly if their functions were not in line with the features of human intelligence. Thus, he proposed that reflex control should be an important source of the subconscious control of robots, and called on robot designers to design with human subconscious intelligence in mind.
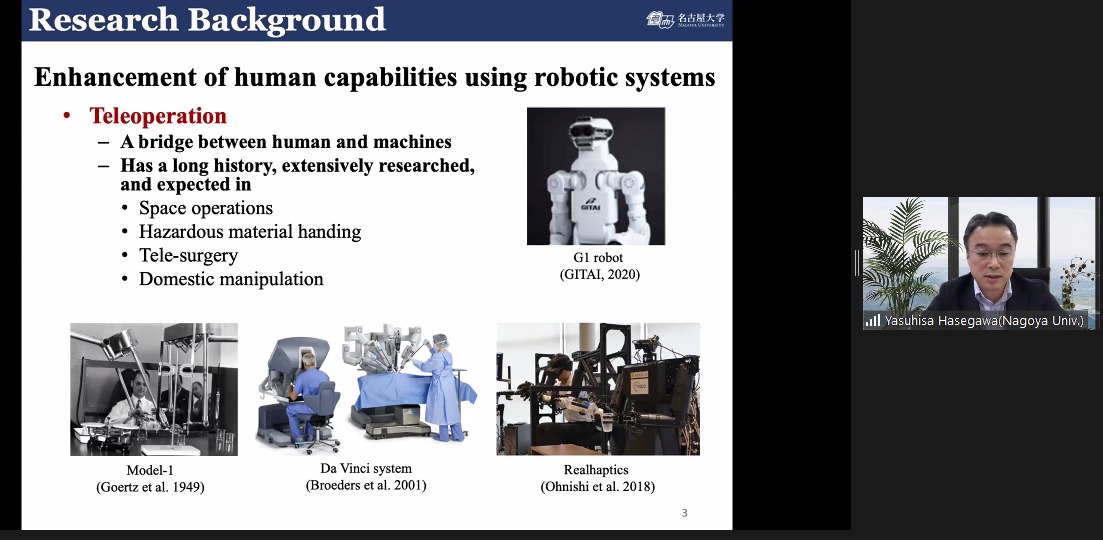
Yasuhisa Hasegawa, NU
Professor Yasuhisa Hasegawa from Nagoya University delivered a lecture titled Robot Embodiment and Teleoperation. Professor Hasegawa introduced his study on the additional robot finger to human palms. He found that the somatosensory control of additional limbs would alter bodily representations, and that body sensory feedback was the major force behind the improved self-position perception. He proposed an onomatopoeia-based feedback method to enhance tactile perception in time-delayed teleoperation based on the above-mentioned findings.
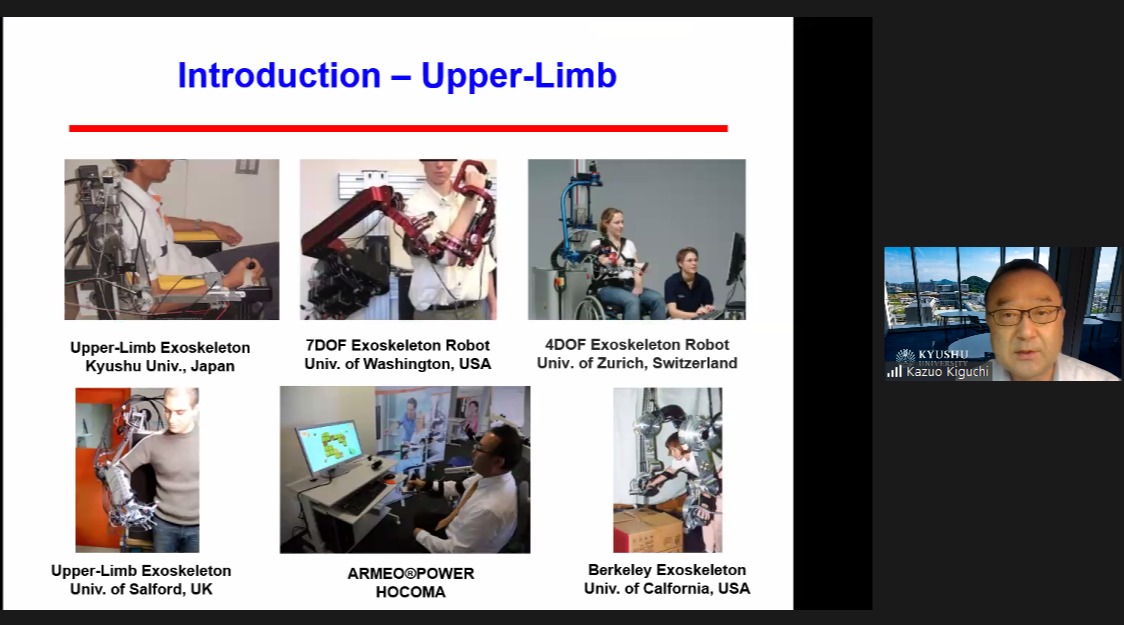
Kazuo Kiguchi, Kyushu University, NU alumnus
Professor Kazuo Kiguchi from Kyushu University delivered a lecture titled Robotic Systems for Human Motion Assist and Modification. Professor Kiguchi briefed the current research dynamic of rehabilitation robots, myoelectric prostheses, and limb-assist systems, and shared his team's work on the design and functions of the Power-assist Exoskeleton (EMG) and EMG-based control methods.
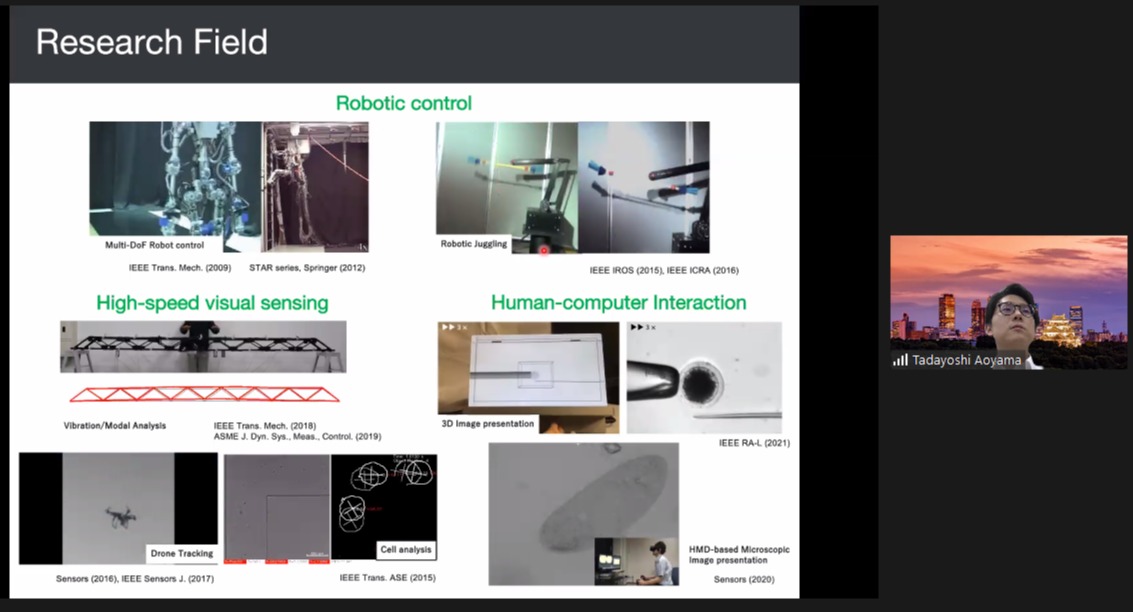
Tadayoshi Aoyama, NU
Dr. Tadayoshi Aoyama from Nagoya University delivered a lecture titled Real-time Visual Sensing and Its Application. The lecture focused on the real-time visual sensing applications in measurement, biomedicine, and robotics. In one case, Prof. Aoyama used real-time visual sensing, enabling a single camera to measure the multi-point vibration displacement of a bridge; In the biomedical scenario, he successfully built a microscopic operating system and constructed a 3D image display system to assist microscopic injection.
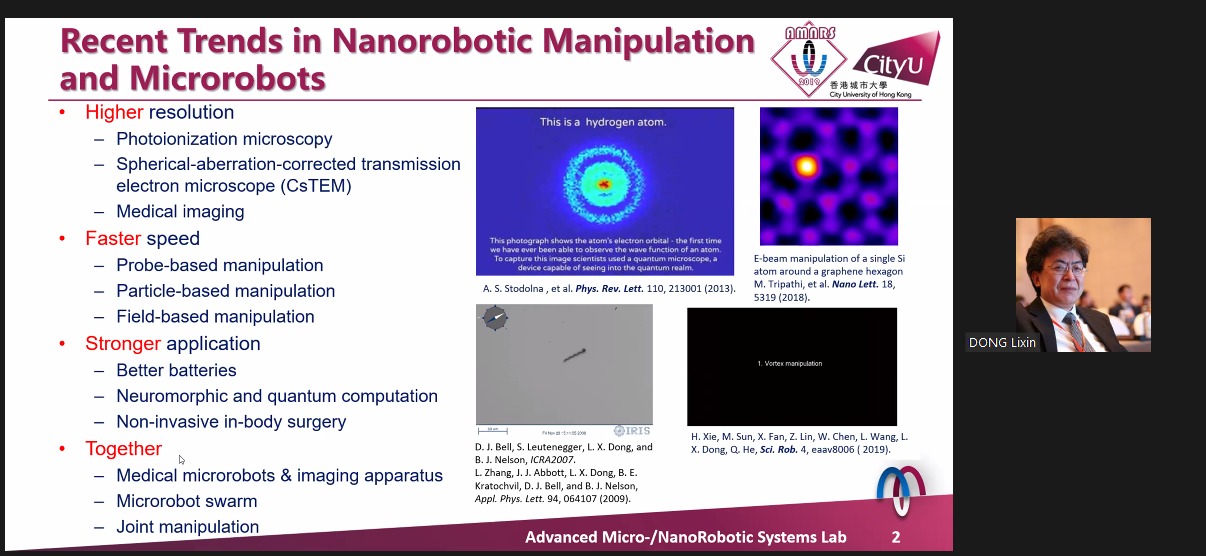
DONG Lixin, City University of Hong Kong, NU alumnus
Professor DONG Lixin from City University of Hong Kong delivered a lecture titled Recent Trends in Nanorobotic Manipulation and Micro-robots. The lecture introduced the goals and the latest progress in micro-nano robotics research, and the potential of its applications. Prof. Dong pointed out that integrated micro-nano technology could form a foundation for quantum sensing, energy transfer, and structured intelligence of micro-nano robots. He also said that the newly invented Microrobot Swarms had multiple functions that looked promising if applied in emerging fields such as non-invasive precision medicine and nanomanufacturing.
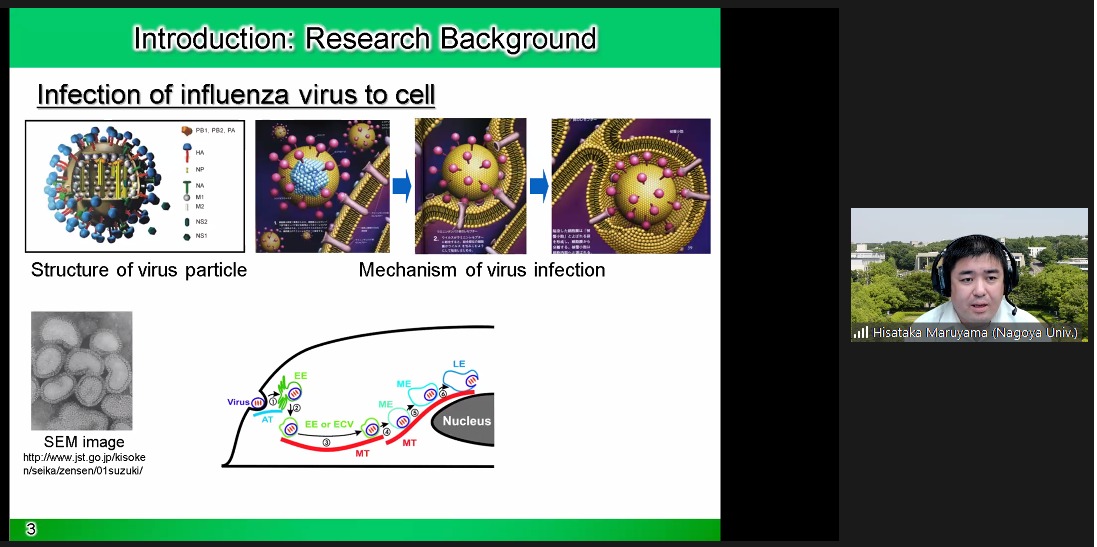
Hisataka Maruyama, NU
Dr. Hisataka Maruyama from Nagoya University delivered a lecture titled Opto-Chemo Robotics: Optical Micro-manipulation and Measurement for Biomedical Applications. He introduced the research background and functions of opto-chemo robotics, including measurement using fluorescent dyes, cell fixation and cell injection. He then briefly described two applications of opto-chemo robots.
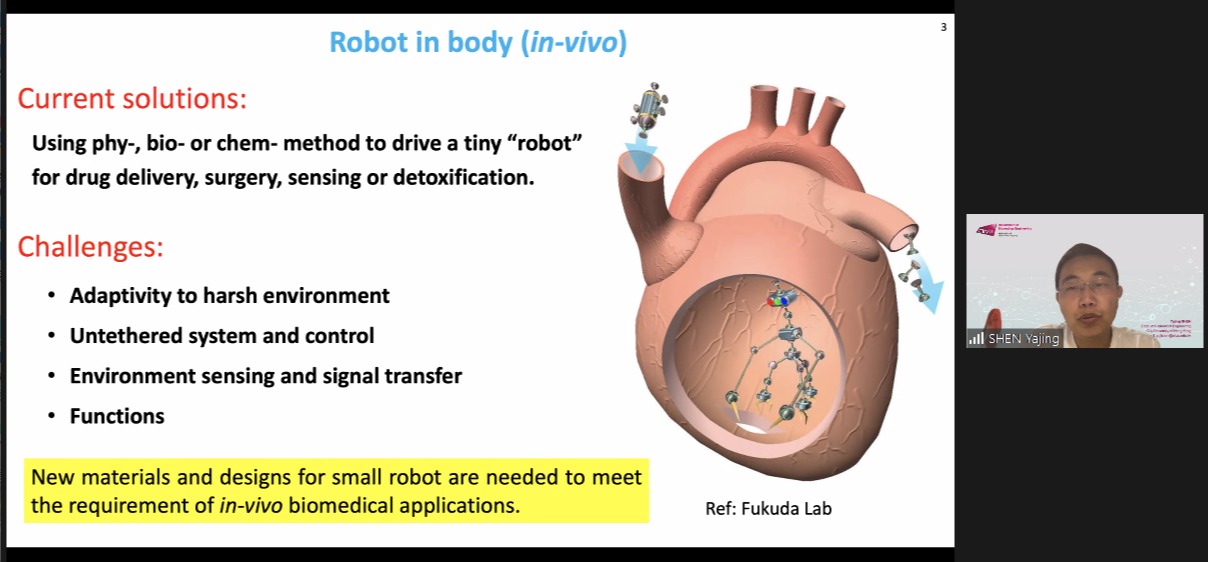
SHEN Yajing, City University of Hong Kong, NU alumnus
Dr. Yajing Shen from City University of Hong Kong delivered a lecture titled Bio-inspired Small Robotics for Biomedical Engineering. The lecture presented the basic background, recent advances, and future challenges of small robots for biomedical applications. Prof. Shen took his team's research of multi-legged soft mini-robots for example, elaborating on the robots' structure, control, sensing, and applications, especially the challenges and related solutions. During the lecture, Prof. Shin shared his views and thoughts on robotics, intelligence, and biomedical engineering, also talked about the prospects and opportunities for small robots.
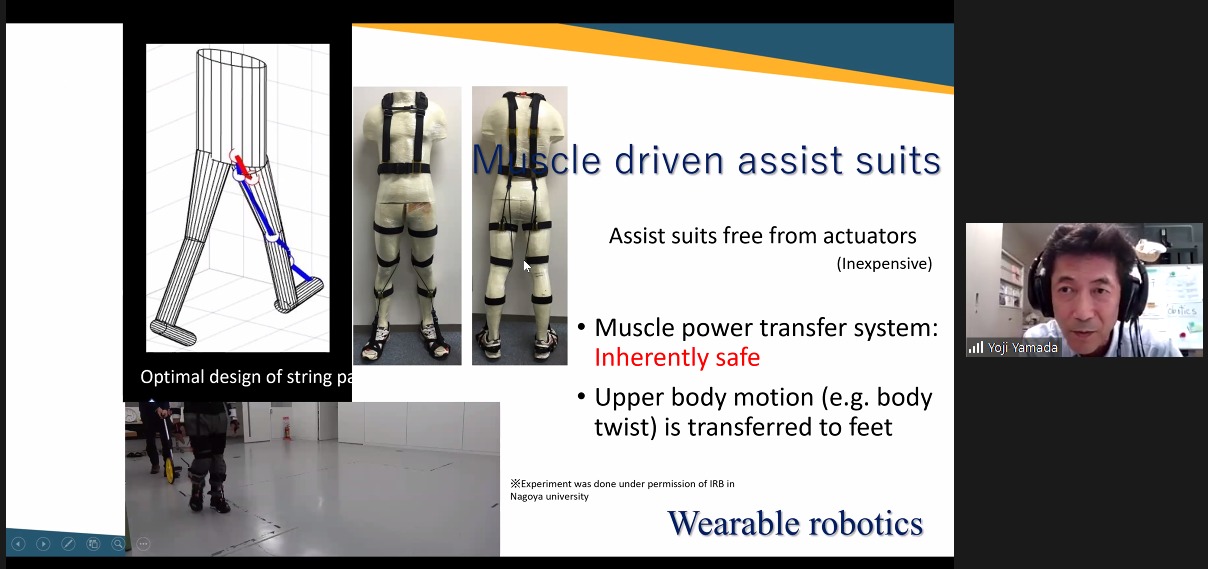
Yoji Yamada, NU
Professor Yoji Yamada from Nagoya University delivered a lecture titled A Safety Technology in support of Personal Care Robots. Professor Yamada talked about the possible risky falls of care robots in research experiments, proposed a comprehensive risk assessment method and preventive measures, thus established a set of complete experimental safety standards. The safety standards reviewed robot safety through three fronts -- identification and monitoring of fall risks, experimental verification of risk occurrences, and accountability system.

HUANG Jian, HUST, NU Alumnus
Professor Jian Huang from HUST delivered a lecture titled Rehabilitation Robot Driven by Pneumatic Actuators. He pointed out the importance of research on rehabilitation robots due to the expanding groups of the elderly and the disabled in China. He then shared the team's research progress in pneumatic rehabilitation robots for upper and lower limbs and the latest achievements after the application of new technologies including deep neural networks into the intelligent control of robots.

Nagoya University, founded in 1871, is a national research university in Japan with extremely high research standards in physics, chemistry, and control science. It is the cradle for six Nobel laureates and one Fields Medal winner. Its Graduate School of Engineering and AIA have been partners in a new international collaboration program. At present, the two schools are pushing forward cooperation on various fronts including teaching, research, and discipline development.


